Dynamic Programming
Matrix Chain-Products
- Dynamic Programming is a general algorithm design paradigm.
- Rather than give the general structure, let us first give a motivating example:
- Matrix Chain-Products
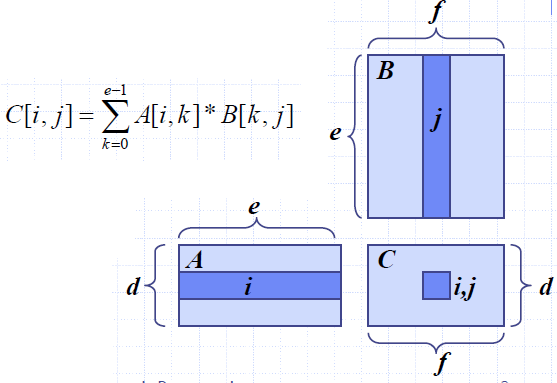
- Review: Matrix Multiplication.
- C = A*B
- A is d × e and B is e × f
- O(d⋅e⋅f ) time
- Matrix Chain-Product:
- Compute A=A0*A1*…*An-1
- Ai is di × di+1
- Problem: How to parenthesize?
- Example
- B is 3 × 100
- C is 100 × 5
- D is 5 × 5
- (B*C)*D takes 1500 + 75 = 1575 ops
- B*(C*D) takes 1500 + 2500 = 4000 ops
Enumeration Approach
- Matrix Chain-Product Alg.:
- Try all possible ways to parenthesize A=A0*A1*…*An-1
- Calculate number of ops for each one
- Pick the one that is best
- Running time:
- The number of parenthesizations is equal to the number of binary trees with n nodes
- This is exponential!
- It is called the Catalan number, and it is almost 4n.
- This is a terrible algorithm!
Greedy Approach
- Idea #1: repeatedly select the product that uses (up) the most operations.
- Counter-example:
- A is 10 × 5
- B is 5 × 10
- C is 10 × 5
- D is 5 × 10
- Greedy idea #1 gives (A*B)*(C*D), which takes 500+1000+500 = 2000 ops
- A*((B*C)*D) takes 500+250+250 = 1000 ops
Another Greedy Approach
- Idea #2: repeatedly select the product that uses the fewest operations.
- Counter-example:
- A is 101 × 11
- B is 11 × 9
- C is 9 × 100
- D is 100 × 99
- Greedy idea #2 gives A*((B*C)*D)), which takes 109989+9900+108900=228789 ops
- (A*B)*(C*D) takes 9999+89991+89100=189090 ops
- The greedy approach is not giving us the optimal value.
“Recursive” Approach
- Define subproblems:
- Find the best parenthesization of Ai*Ai+1*…*Aj.
- Let Ni,j denote the number of operations done by this subproblem.
- The optimal solution for the whole problem is N0,n-1.
- Subproblem optimality: The optimal solution can be defined in terms of optimal subproblems
- There has to be a final multiplication (root of the expression tree) for the optimal solution.
- Say, the final multiply is at index i: (A0*…*Ai)*(Ai+1*…*An-1).
- Then the optimal solution N0,n-1 is the sum of two optimal subproblems, N0,i and Ni+1,n-1 plus the time for the last multiply.
- If the global optimum did not have these optimal subproblems, we could define an even better “optimal” solution.
Characterizing Equation
- The global optimal has to be defined in terms of optimal subproblems, depending on where the final multiply is at.
- Let us consider all possible places for that final multiply:
- Recall that Ai is a di × di+1 dimensional matrix.
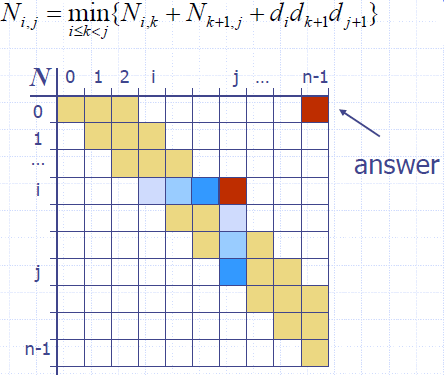
- So, a characterizing equation for Ni,j is the following:

- Note that subproblems are not independent–the subproblems overlap.
Dynamic Programming Algorithm Visualization
- The bottom-up construction fills in the N array by diagonals
- Ni,j gets values from previous entries in i-th row and j-th column
- Filling in each entry in the N table takes O(n) time.
- Total run time: O(n3)
- Getting actual parenthesization can be done by remembering “k” for each N entry
Dynamic Programming Algorithm
- Since subproblems overlap, we don’t use recursion.
- Instead, we construct optimal subproblems “bottom-up.”
- Ni,i’s are easy, so start with them Then do problems of “length” 2,3,… subproblems, and so on.
- Running time: O(n3)
Algorithm matrixChain(S):
Input: sequence S of n matrices to be multiplied
Output: number of operations in an optimal parenthesization of S
for i ← 1 to n − 1 do
Ni,i ← 0
for b ← 1 to n − 1 do
{ b = j − i is the length of the problem }
for i ← 0 to n − b − 1 do
j ← i + b
Ni,j ← +∞
for k ← i to j − 1 do
Ni,j ← min{Ni,j, Ni,k + Nk+1,j + di dk+1 dj+1}
return N0,n−1
The General Dynamic Programming Technique
- Applies to a problem that at first seems to require a lot of time (possibly exponential), provided we have:
- Simple subproblems: the subproblems can be defined in terms of a few variables, such as j, k, l, m, and so on.
- Subproblem optimality: the global optimum value can be defined in terms of optimal subproblems
- Subproblem overlap: the subproblems are not independent, but instead they overlap (hence, should be constructed bottom-up).
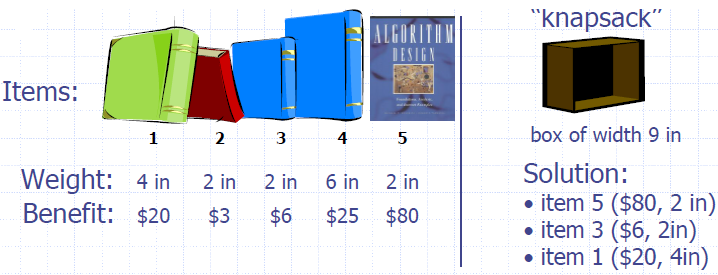
The 0/1 Knapsack Problem
- Given: A set S of n items, with each item i having
- wi - a positive weight
- bi - a positive benefit
- Goal: Choose items with maximum total benefit but with weight at most W.
- If we are not allowed to take fractional amounts, then this is the 0/1 knapsack problem.
- In this case, we let T denote the set of items we take
- Objective: maximize

- Constraint:
Example
- Given: A set S of n items, with each item i having
- wi - a positive “benefit”
- bi - a positive “weight”
- Goal: Choose items with maximum total benefit but with weight at most W.
A 0/1 Knapsack Algorithm, First Attempt
- Sk: Set of items numbered 1 to k.
- Define B[k] = best selection from Sk.
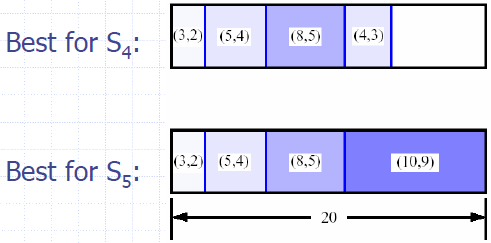
- Problem: does not have subproblem optimality:
- Consider set S={(3,2),(5,4),(8,5),(4,3),(10,9)} of (benefit, weight) pairs and total weight W = 20
A 0/1 Knapsack Algorithm, Second Attempt
- Sk: Set of items numbered 1 to k.
- Define B[k,w] to be the best selection from Sk with weight at most w
- Good news: this does have subproblem optimality.

- I.e., the best subset of Sk with weight at most w is either
- the best subset of Sk-1 with weight at most w or
- the best subset of Sk-1 with weight at most w−wk plus item k
0/1 Knapsack Algorithm
- Recall the definition of [k,w]
- Since B[k,w] is defined in terms of B[k−1,*], we can use two arrays of instead of a matrix
- Running time: O(nW).
- Not a polynomial-time algorithm since W may be large
- This is a pseudo-polynomial time algorithm
Algorithm 01Knapsack(S, W):
Input: set S of n items with benefit bi and weight wi; maximum weight W
Output: benefit of best subset of S with weight at most W
{let A and B be arrays of length W + 1}
for w ← 0 to W do
B[w] ← 0
for k ← 1 to n do
copy array B into array A
for w ← wk to W do
if A[w−wk] + bk > A[w] then
B[w] ← A[w−wk] + bk
return B[W]