Graph Additions
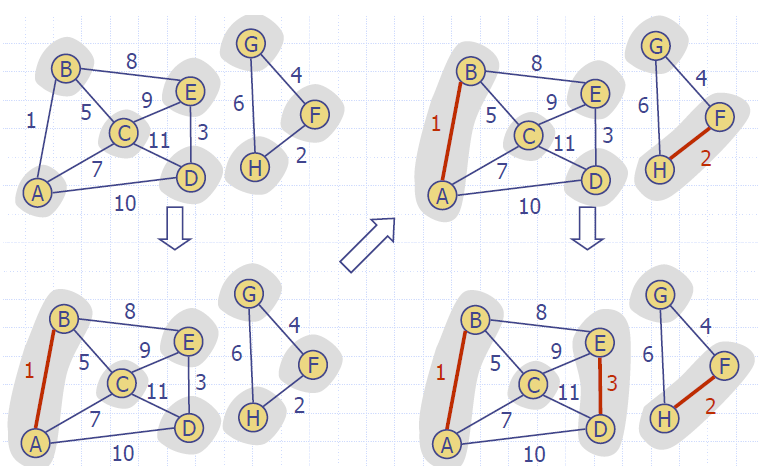
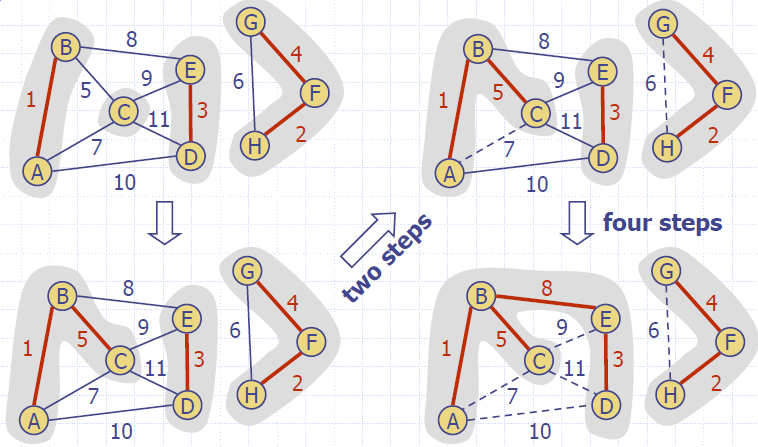
Kruskal's Algorithm
- The vertices are partitioned into clouds
- We start with one cloud per vertex
- Clouds are merged during the execution of the algorithm
- Partition ADT:
- makeSet(o): create set {o} and return a locator for object o
- find(l): return the set of the object with locator l
- union(A,B): merge sets A and B
Algorithm KruskalMSF(G)
Input weighted graph G
Output labeling of the edges of a minimum spanning forest of G
Q ← new heap-based priority queue
for all v ∈ G.vertices() do
l ← makeSet(v) { elementary cloud }
setLocator(v,l)
for all e ∈ G.edges() do
Q.insert(weight(e), e)
while ¬Q.isEmpty()
e ← Q.removeMin()
[u,v] ← G.endVertices(e)
A ← find(getLocator(u))
B ← find(getLocator(v))
if A ≠ B
setMSFedge(e)
{ merge clouds }
union(A, B)
Code
package examples;
import graphLib.*;
import graphTool.Algorithm;
import graphTool.Attribute;
import graphTool.GraphTool;
import java.awt.Color;
import java.io.Serializable;
import java.util.ArrayList;
import java.util.Arrays;
import java.util.Iterator;
import java.util.LinkedList;
import java.util.Random;
public class GraphExamples<V,E> {
@Algorithm
public void kruskal(Graph<V,E> g, GraphTool<V, E> t){
Iterator<Vertex<V>> it = g.vertices();
while(it.hasNext()){
Vertex v =it.next();
ArrayList<Vertex<V>> cluster = new ArrayList<>();
cluster.add(v);
v.set(Attribute.CLUSTER,cluster);
}
PriorityQueue<Double,Edge<E>> pq = new MyPriorityQueue<>();
Iterator<Edge<E>> eit = g.edges();
while(eit.hasNext()){
Edge e = eit.next();
double weight = 1;
if (e.has(Attribute.weight)) weight=(Double)e.get(Attribute.weight);
pq.insert(weight, e);
}
while (! pq.isEmpty()){
Edge e = pq.removeMin().element();
Vertex[] endPts = g.endVertices(e);
ArrayList<Vertex> cluster0 = (ArrayList)endPts[0].get(Attribute.CLUSTER);
ArrayList<Vertex> cluster1 = (ArrayList)endPts[1].get(Attribute.CLUSTER);
if (cluster1 != cluster0){
e.set(Attribute.color,Color.GREEN);
t.show(g);
for(Vertex w:cluster1){
cluster0.add(w);
w.set(Attribute.CLUSTER,cluster0);
}
}
}
}
public static void main(String[] args) {
IncidenceListGraph<String,String> g =
new IncidenceListGraph<>(true);
GraphExamples<String,String> ge = new GraphExamples<>();
Vertex vA = g.insertVertex("A");
vA.set(Attribute.name,"A");
Vertex vB = g.insertVertex("B");
vB.set(Attribute.name,"B");
Vertex vC = g.insertVertex("C");
vC.set(Attribute.name,"C");
Vertex vD = g.insertVertex("D");
vD.set(Attribute.name,"D");
Vertex vE = g.insertVertex("E");
vE.set(Attribute.name,"E");
Vertex vF = g.insertVertex("F");
vF.set(Attribute.name,"F");
Vertex vG = g.insertVertex("G");
vG.set(Attribute.name,"G");
Edge e_a = g.insertEdge(vA,vB,"AB");
Edge e_b = g.insertEdge(vD,vC,"DC");
Edge e_c = g.insertEdge(vD,vB,"DB");
Edge e_d = g.insertEdge(vC,vB,"CB");
Edge e_e = g.insertEdge(vC,vE,"CE");
e_e.set(Attribute.weight,2.0);
Edge e_f = g.insertEdge(vB,vE,"BE");
e_f.set(Attribute.weight, 7.0);
Edge e_g = g.insertEdge(vD,vE,"DE");
Edge e_h = g.insertEdge(vE,vG,"EG");
e_h.set(Attribute.weight,3.0);
Edge e_i = g.insertEdge(vG,vF,"GF");
Edge e_j = g.insertEdge(vF,vE,"FE");
GraphTool t = new GraphTool(g,ge);
}
}
Partition Implementation
- Partition implementation
- A set is represented the sequence of its elements
- A position stores a reference back to the sequence itself (for operation find)
- The position of an element in the sequence serves as locator for the element in the set
- In operation union, we move the elements of the smaller sequence into to the larger sequence
- Worst-case running times
- makeSet, find: O(1)
- union: O(min(nA, nB))
- Amortized analysis
- Consider a series of k Partiton ADT operations that includes n makeSet operations
- Each time we move an element into a new sequence, the size of its set at least double
- An element is moved at most log2 n times
- Moving an element takes O(1) time
- The total time for the series of operations is O(k + n log n)
Analysis of Kruskal’s Algorithm
- Graph operations
- Methods vertices and edges are called once
- Method endVertices is called m times
- Priority queue operations
- We perform m insert operations and m removeMin operations
- Partition operations
- We perform n makeSet operations, 2m find operations and no more than n − 1 union operations
- Label operations
- We set vertex labels n times and get them 2m times Kruskal’s algorithm runs in time O((n + m) log n) time provided the graph has no parallel edges and is represented by the adjacency list structure
Decorator Pattern
- Labels are commonly used in graph algorithms
- Examples
- DFS: unexplored/visited label for vertices and unexplored/ forward/back labels for edges
- Dijkstra and Prim-Jarnik: distance, locator, and parent labels for vertices
- Kruskal: locator label for vertices and MSF label for edges
- The decorator pattern extends the methods of the Position ADT to support the handling of attributes (labels)
- has(a): tests whether the position has attribute a
- et(a): returns the value of attribute a
- set(a, x): sets to x the value of attribute a
- destroy(a): removes attribute a and its associated value (for cleanup purposes)
- The decorator pattern can be implemented by storing a dictionary of (attribute, value) items at each position
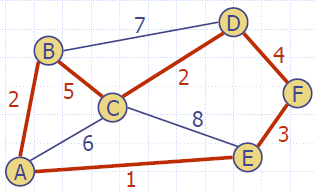
Traveling Salesperson Problem
- A tour of a graph is a spanning cycle (e.g., a cycle that goes through all the vertices)
- A traveling salesperson tour of a weighted graph is a tour that is simple (i.e., no repeated vertices or edges) and has has minimum weight
- No polynomial-time algorithms are known for computing traveling salesperson tours
- The traveling salesperson problem (TSP) is a major open problem in computer science
- Find a polynomial-time algorithm computing a traveling salesperson tour or prove that none exists
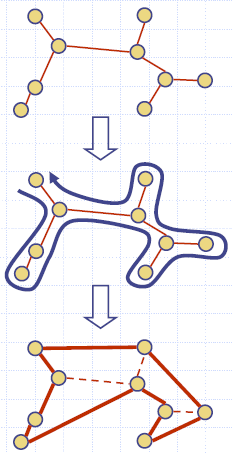
TSP Approximation
- We can approximate a TSP tour with a tour of at most twice the weight for the case of Euclidean graphs
- Vertices are points in the plane
- Every pair of vertices is connected by an edge
- The weight of an edge is the length of the segment joining the points
- Approximation algorithm
- Compute a minimum spanning tree
- Form an Eulerian circuit around the MST
- Transform the circuit into a tour